I think by now most people have seen the video demonstrating Christiana Ronaldo’s incredible ability to play soccer “in the dark” – that is, execute skilled actions when the lights are turned completely off at some point.
The typical explanation for why he can do this (including the one given by the people in the video) is that he is using predictive, model-based control. That is, he is using advance cues from the kicker’s kinematics as inputs to an internal model that is used to predict the future location of the ball and plan an appropriate action by parameterizing a stored motor program (e..g, for heading or a half volley). This is evident in the comments made in the video: “he will use advance cues to tell where the ball is going to go?” (aka he will make a prediction) and “By 500 msec Ronaldo’s subconscious has interpreted Andy’s body language, worked out what direction the ball will go in, calculated its speed and trajectory, and then programmed his body to reach it at the optimum moment.” (aka he is using an internal model to compute the future location of the ball and executing a ballistic, open-loop movement). The reason the unskilled patsy in the video (Ronald) can’t successfully perform the action is primarily due to the fact that his internal model is not as well-developed as Ronaldo’s.
Evidence that people can perform actions like this under conditions of visual occlusion (the lights going off) seems to be irrefutable evidence that skilled actions in sports involve predictive control. But are they really?
The alternative: Prospective, online control
The alternative approach to understand how a skill like heading a soccer ball is performed is prospective, online control. In this type of control only visual information currently available in the unfolding event is used and control doesn’t involve an internal model used to generate predictions about the future. Instead of using predictive control, the action is controlled prospectively. In prospective control, movement is coupled to specifying information. An example of prospective control successfully applied to a sports-related task is the required velocity model (RVM) of catching a ball passing close to the body e.g., catching a line drive in baseball. In this model, instead of predicting where the ball will be at some future instant, the catcher continuously regulates the lateral velocity of their hand movement ( Xh dot) using the control law:
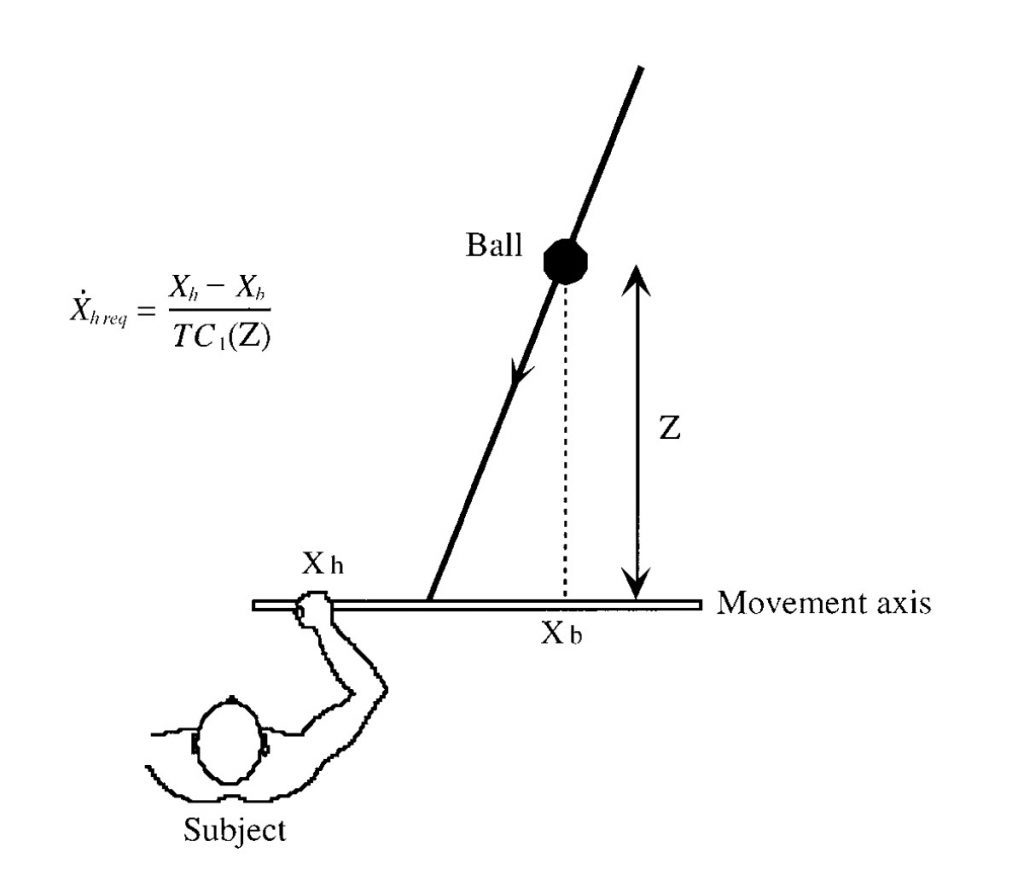
where the Time to Collision (TC or TTC) is given by:
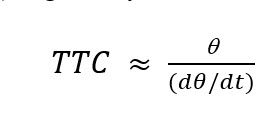
Xh and Xb are the lateral positions (relative to the eye) of the hand and the ball and theta is the angular size of the ball on the eye. If this relationship is maintained, the hand will end up in the right place at the right time to intercept the ball. Further processing of the sensory information by an internal model is not necessary because this type of control does not use spatial memories of previous trajectories nor does it involve any type of prediction about where the ball will be. Instead of using prediction, prospective information tells a performer about their “current future” , that is whether or not their current pattern of movement (the speed of their hand in this case) will allow them to achieve their future goal (interception). Another sports-related application of prospective control is the well-studied “outfielder problem” i.e., running to catch a flyball.
Is the fact that Ronaldo can still execute his skill when the lights are turned off really evidence in support of predictive control or can prospective control give an equally-plausible (perhaps even more parsimonious) explanation for what is going on?
Re-evaluation of Ronaldo’s “in the dark” Performance
A variant of the RVM can be applied to the task of moving to head or kick a crossed soccer ball as shown in the figure below. The player’s acceleration towards the ball (Y double-dot) is given by the following two equations:
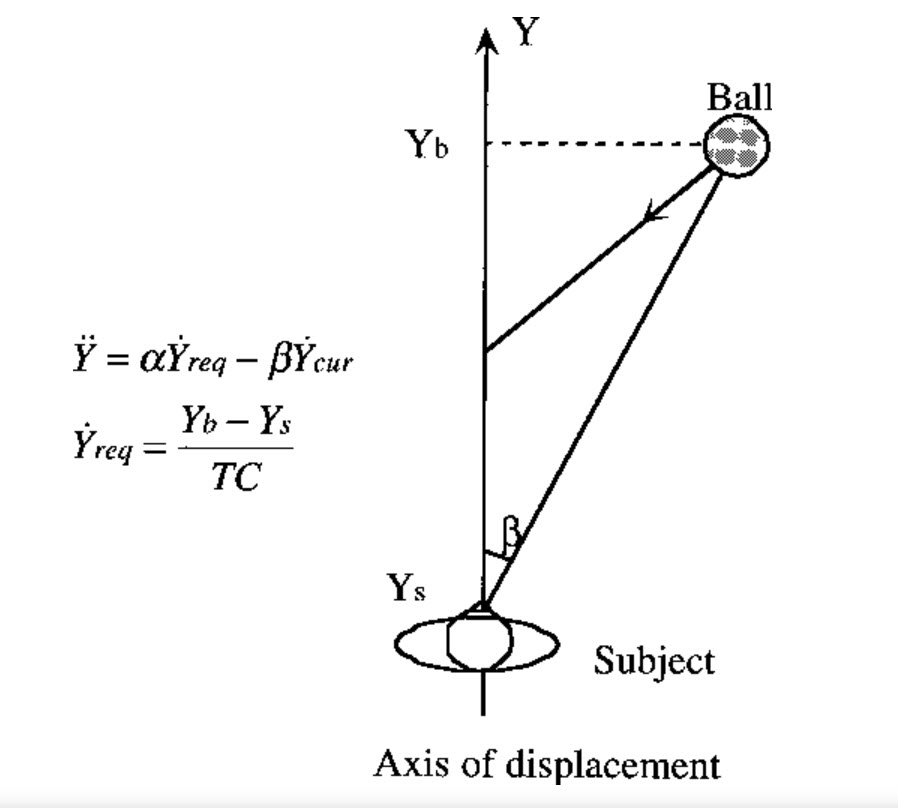
where Beta is the angle between the player and ball (commonly called the “bearing angle”), Y cur is his current running speed, Yreq is the required running speed, and the TC(TTC) is given by the information expressed in the equation above (i.e. the expansion of the ball’s image on the eye). The variable a in this equation is the coupling constant which can be altered to take into account different situations (e.g. when a player is fatigued they may need to recalibrate and turn up the gain on ‘a’ so that larger movements are used to produce the same change in velocity). If this approach is used, a player can get to the right place at the right time to intercept the ball without ever having to predict – they simply need to adjust their movement velocity online to keep the relationship above, using information that is currently available during the action.
While this idea is nice, on the surface, it doesn’t seem to hold water in explaining the Ronaldo video for a few reasons (that I am going to challenge!):
1) If performance is successful in situations where current information becomes unusable/unavailable then it must be predictive control.
If prospective control relies on current, online information about the TTC and direction of the ball, then how can a performer be successful when this it is taken away- for example, when the lights are turned off during movement or the action is so fast that there doesn’t seem to be time to use visual information due to the transmission delays? Wouldn’t performance just fall apart at this point?
An often misunderstood point (present company included!) about prospective control is that it can produce either closed-loop/continuous (i.e. when sensory information is used to alter the movement) or open-loop/ballistic patterns (i.e. when sensory information is no longer used to alter a movement) of movement. An open-loop, ballistic-type of prospective control can be understood by using the concept of attractor relaxation in dynamical systems theory. If the information (beta and TTC) become no longer available in the equations above, the system will relax to values that will get the player to the ball without any additional input. This will work as long as there are no changes in the ball’s trajectory.
Another way to think of this is in terms of the “current future” concept of prospective control. If Ronaldo controls his movement based on the equations above, at any given point in the action, if nothing else changes he will be successful if he just keeps doing what he is currently doing. This is because he is controlling his action based on information about what will happen in the future, not what is happening now. Thus, if visual information becomes unavailable/unusable at some point (e.g., because the ball is occluded in a lab study or it is too late to use it to alter the movement) then the action can still unfold if the player just keeps moving in the manner they were when information was last available. But, critically, this is not the same as predicting the future!
If you look closely at the first “in the dark” header Ronaldo makes in the video, this is exactly what happens. He is continually making small adjustments to his running speed and direction, and head motion up to the point the lights go out and then nothing really changes dramatically after that. Before the lights go out:

After:

Looks like part of the same smooth continuous adjustment to me! But the main point I want to make here is: Performing this action DOES NOT necessarily require predictive control. It can be fully understood by having a broader conception of prospective control. But what about the play where they turn the lights off even earlier Rob?! I will get to that.
2) The difference between Ronald and Ronaldo must lie in the vast knowledge Ronaldo has stored in his head from his past experience which allows him to predict more accurately
No, it doesn’t. The expertise difference here can again be explained entirely in terms of online, prospective control. Specifically, Ronaldo uses a different control law to adjust his movement online, that relies on different information sources (as the commentator in the video correctly points out – using information from the kicker to control the first part of the movement instead of looking at the ball) and is likely more well calibrated (the coupling constant) to his own abilities. In the video, watch the difference between Ronald and Ronaldo before the lights go out. It is huge! As shown above, Ronaldo is moving quickly, and aggressively directly towards the ball with his body already starting to angle downwards. Conversely, as shown in the image below, Ronald is moving forward slowly, shifting from side-to -side (rather than going directly towards the ball) and is standing very upright. His movement during the lights on part of the action is completely different, indicating his using a completely different control law.

Bottom line is: we do not need to appeal to internal models, stored knowledge, or prediction/anticipation ability to explain the differences between Ronald and Ronaldo in this video. It can be fully explained in terms of information-movement coupling. Note, this does not make Ronaldo any less skillful or his abilities any less amazing – they just are for a different reason!
3) When the lights are turned off before the ball is kicked Ronaldo must be using predictive control
Ok, you got me there! A purely prospective, online control approach would have a difficult time explaining the last goal Ronaldo scores in the video. But let’s look at what he does a little more closely. Instead of making an quick aggressive movement directly towards the ball he actually moves cautiously away from it and is standing straight up when it arrives. In other words, the first part of his movement is more like Ronald than Ronaldo:

Then what action does he execute when the ball gets to him? Does he do a diving header into corner or a quick half-volley with his foot like he did in the earlier tests? No! Instead of using a small end-effector like the top of his head or foot (with a small surface area and thus requiring precise timing) he puts the ball in the net using a gross movement of a much larger body part (his shoulder) that has a much greater margin for error:

If he could perfectly predict the future location of the ball based on the advance cues from the kicker (as the commentators suggest) then why didn’t he do a precision header or kick? The answer is: he couldn’t. Even though the play he does make is pretty amazing, when your only option is predictive control of a pre-programmed movement you are not as skillful.
This is an example of what Zhao and Warren call a “weak” model of action control. Sure, internal models and predictive control can explain what is going on in this highly specific, unusual situation of the lights going out when the ball is struck but that does not necessarily mean they are a “strong” model – one which explains behavior under a much broader range of conditions, like in a real soccer match where no one turns the lights out! The fact that there is this dramatic change in the action Ronaldo executes is not evidence that predictive control is a “strong” model – it actually supports the idea that you are using prospective control when the lights are on.
Contrast what we saw in the “playing in the dark video” with what Ronaldo actually does in a game when making a header, as shown in this wonderful slow motion video:
Here he is using continuous subtle adjustments to his body position (i.e., online control!) based on a laser beam focus on visual information from the ball’s flight. There is no possible way this could be achieved by programming a movement based on advance cues from the kicker.
Why prospective online control gives a more parsimonious explanation of the control of action
Even if we except that under the more “normal” conditions (where the lights are on for part of the ball flight) Ronaldo’s behavior could be explained equally well by either predictive or prospective control then the latter still gives a more parsimonious account. As the commentator says when talking about predictive control: “It’s almost as if they are doing maths in their head”. If we don’t need to appeal to a complicated internal computation process then why should we? Information-movement coupling gives a much simpler account. Notice also how in the discussion of predictive control there is typically no explanation of how the action is actually controlled (e.g. how exactly do you use the prediction of where and when to control the downward movement your head?). And that is again true here. Contrast this with prospective control where how the movement is controlled is directly specified in testable control laws (like the equations above) that make specific predictions about actual patterns of movement. Why do you think there have been so many studies of the outfielder problem? Finally, you might ask: wouldn’t a predictive model that is frequently updated using current information also explain the behavior we see? Sure, maybe, but why go to the trouble of predicting if you are just going to keep using rich, currently available information – a prediction is something you do when you don’t have information and/or it is impoverished! So which approach is really left “in the dark”? 🙂