If I add a constraint to practice to take away (i.e., de-stabilize) a movement solution won’t the performer just return to using their old, familiar solution once the constraint is removed?
This is a question I get asked a lot and indeed it is important issue both for the Constraints Led Approach (CLA) and most other coaching interventions! To explore it let’s consider a specific example of a CLA practice activity recently posted by Baseball Rebellion.
Here we have identified a problem with the performer’s existing movement solution: when they try to block a pitch thrown in the dirt with just their arms or glove they are letting balls get past them. Note, importantly, “the problem” identified with the solution is NOT that it doesn’t conform to some ideal technique it is that it is leading to poor performance outcomes. One way we can address this issue in a practice activity is by adding a constraint (in the form of a rule/instruction that they must keep their arms behind their back) that takes away their existing solution and encourages them to move towards a more optimal one: getting your whole body behind the ball, thus, allowing for greater margin for error if the ball takes a strange hop.
So, returning to the main issue of this post: how do we prevent the catcher from returning to just using their glove/arms to block balls once we take this rule constraint away? Well, there is no one right answer to this question, I think there are a few considerations and best practices they can help reduce the likelihood it will happen:
1)Stabilize the new movement solution (attractor) by adding variability to the CLA activity
-One of the main reasons we want an athlete to move away from their existing movement solution to a more optimal one is because their existing one only works under certain conditions (i.e.., it is not adaptable). Holding your hands low as a quarterback works when the defensive players are not that fast and you have a lot of time but not when they are getting on you in a hurry! Jumping on a fastball in baseball works when a pitcher doesn’t have a lot of pitches but not when they have a great change-up etc. As much as possible we need to expose the learner to these fluctuations in conditions in practice so the system with learn to adapt.
So in the catching example, I think it would be good to make sure to use different ball speeds, bounce lengths, and bounce directions. By varying the conditions it will help the athlete find out “what works” and what doesn’t – or in other words, what are the key elements of the movement solution that will allow me to achieve my goal under varying conditions.
2)Use other constraints manipulations that also serve to de-stabilize the non-optimal solution
-Converging manipulations/methods are a really powerful tool for learning! So, in this example, I would consider using a small or more bouncy ball in a separate activity. This again, would serve to make the non-optimal solution of just blocking with your glove ineffective.
3)Add pressure to practice
-We know from Reinvestment Theory that performance pressure is going to be one of the main factors that pushes an athlete back to their old, non-optimal movement solution. So, it’s important to “pressure-proof” the new movement solution by adding some pressure to practice. This can be achieved in a variety of different ways including adding time constraints (e.g., leaving a much shorter time in between the thrown balls or requiring the catcher to throw out a runner after blocking the ball) or by adding competitive or social pressure. I discussed ideas for this in Episode 79
4)Take into account individual differences and the possibility of meta-stability
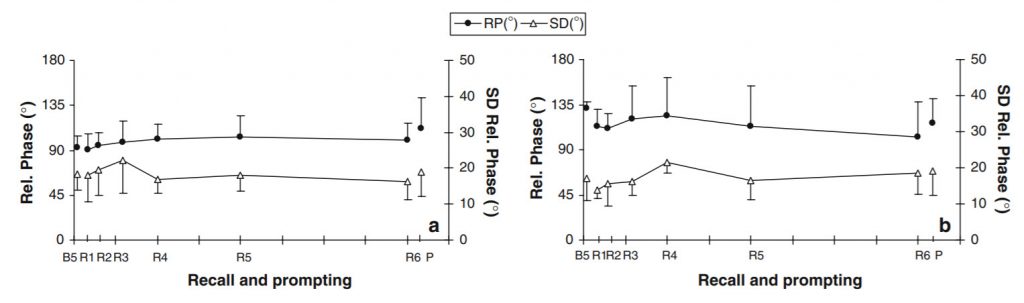
-The final point I want to mention is one I am going to discuss in upcoming podcast episodes: differences in stability due to the performer’s intrinsic dynamics. Research on inter-limb coordination (shown below) has found that when learning requires the addition of a completely new attractor (called a bifurcation, left panel) it is retained much better as compared to when learning requires just a shift in the location of an existing attractor (called a shift, right panel). The route to learning a performer takes depends on the intrinsic coordination dynamics they start with!
Thus we should expect to see fairly large individual differences in how “sticky” (stable/retained) a new movement solution is.
Another possibility that also needs to be considered is that the new movement solution is actually meta-stable. So, for example, in the catching case, maybe after practice the performer can flexibly switch between just using their glove in some instances (e.g. when the ball is passing way far to the side) and using their whole body in other cases. Being “flexibly unstable” like this can be a great advantage in many cases — and I will be discussing this in an episode coming soon!